
 1
1is the answer
2v0/[l cos(theta)]
 11
11You have found the w at the given instant.We need to find it after collision.
 11
11firstly write torque equation about point of rotation i.e
Mgl/2SIN@=1/3ML^2a[a is the angular accleration}
now replace a by dw/dt and multiply both sides by d@
3g/2l∫SIN@=∫wdw(CAN BE OBTAINED BY E CONSERVATION ALSO)
find w of rod just before collision.
now apply angular momentum conservation about that point.
it will have only w after collision since impact force is Fdt at centre of mass. this way you find w.
 23
23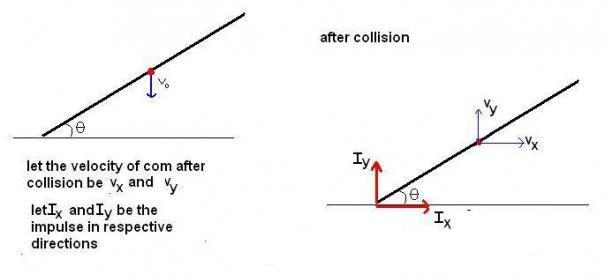
Iy = m (vy + vo) ........(1)
Ix=mvx..........(2)
also
writing angular impulse abt com
IyLcosθ2 - IxLsinθ2 = mL212w...........(3)
since collision is elastic , energy is conserved
mvo22= mvc22+ 12Icw2 = m(vx2+vy2)2 + 12Icw2 .........(4)
now since friction isnt present Ix= 0 ...........(5)
now unknowns are vx ,vy,Ix,Iy, w
i.e 5 unknowns and we hav 5 eqns
so u can find w
( i m not sure abt the 5th equation , experts pls confirm )
11yaar qwerty ek baat bata collision ke just dt second ke doraan uske pas x me velocity kaise aa sakti hai.
VELOCITY CANT BE CHANGED INSTANTANEOUSLY.
At one end you say the reaction force in X is 0 and on the other hand you also considering Vcm in X.
And according to me iss question me to force ke chakkar me parna hi nahi chahiye.
BUT IF YOU DO FIND SOME MISTAKE IN MY LOGIC PLEASE DO TELL ME.
23see initially i assumed both Ix and vx
abhi agar Ix zero hota hai to vx bhi apne aap automatically zero ho jaega,see equation 2
and after dt time , velocity is imparted by the impulse itself
and see, u cant just write the torque equation about that lowest point as Iα ,
i will tell u why
see angular momentum of a rigid system about any point P can be written as (angular momentum about P due to pure translational motion of centre of mass ) + (angular momentum due to pure rotational motion of COM abt P )
i.e
L_{p}=L_{cm,about P(trans)}+L_{cm,about P(rot)}
i.e
L_{p}=I_{cm}\omega +\vec{r}_{c/p}\times m\vec{v}_{c}
for this sum , pt P is the lowest pt of the rod so distance between COM and P remains same
differentiate both sides wrt time
\tau _{p}=I_{cm}\alpha +\vec{r}_{c/p}\times m\vec{a}_{c}
\tau _{p}=I_{cm}\alpha +\vec{r}_{c/p}\times m(\vec{a}_{c/p}+\vec{a}_{p})
\tau _{p}=I_{cm}\alpha +(\vec{r}_{c/p}\times m\vec{a}_{c/p}+\vec{r}_{c/p}\times m\vec{a}_{p})
now cross product of component of ac/p parallel to rc/p will be
zero, and component of ac/p perpendicular to rc/p is simply rc/pα
so \vec{r}_{c/p}\times m\vec{a}_{c/p} = mr^{2}_{c/p}\alpha
so
\tau _{p}=(I_{cm} +m{r}_{c/p}^{2})\alpha +\vec{r}_{c/p}\times m\vec{a}_{p}
\tau _{p}=I_{p}\alpha+\vec{r}_{c/p}\times m\vec{a}_{p}
here since pt P is accelerated u cant just simply write torque abt P = Ipα
11second term me woh extra term kyo hai .
us to a-@r likh diya hai
 1
1Hey guys....
Can't we proceed this way?
Conserving angular momentum about the point of rotation,
mvlcosϑ = ml2w/3 + mVl/2
Since collision is perfectly elastic, kinetic energy is conserved.
mv2/2 = (ml2w/3 + mV2)/2
Solving both we get a quadratic equation in w
 1
1i ve not seen the soln yet ..ll revise the chap again nd then ll try myslf nd then go through the soln btw thnxx qwerty bhaiiya nd all otherss....experts can also give their views...
1let the impulse be J
and final velocity be v in the upward direction
\mathrm{J}=m(v_0+v)\cdots\ \ \boxed1\\ \frac{\mathrm{J}\cos\theta l}{2}=\frac{ml^2}{12}\omega\ \ \cdots\boxed2\\ \texttt{since the collision is elastic}\\ v+\frac{\omega l}{2} \cos\theta=v_0\\ \frac{J}{m}+\frac{3J\cos^2\theta}{m}-v_0=v_0\\ J=\frac{2mv_0}{1+3\cos^2\theta}\\ \texttt{from here we get omega by back substituting}\\ \omega=\frac{12v_0\cos\theta}{l(1+3\cos^2\theta)}
23cont from #6
vo+v= Lw6cosθ =Iym
vo2 - v2=L2w212
(vo - v) ( Lw6cosθ ) = L2w212
vo - v = Lwcosθ2
2vo = Lw6cosθ+Lwcosθ2 =Lw (2+6cos2θ)12cosθ
w = 12vocosθL(1+3cos2θ)
i m getting slightly different